
Sitemap
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Pages
Posts
Thoughts on Dexterous Manipulation Tasks
Published:
🖐️ Two Types of Dexterous Manipulation Tasks: Functional Grasping vs. In-Hand Manipulation
Learning Stability: Reflections on Physical Constraints in Dexterous Manipulation
Published:
Over the past few months, I’ve been exploring how physical constraints—like force closure and contact stability—can be introduced directly into the learning process for in-hand manipulation. While most recent progress in dexterous robotic skills has focused on end-to-end reinforcement learning using vision or tactile images, I found myself wondering: what if we teach policies to care about physical grasp stability?
portfolio
Explosive Legged Robotic Hopping Robot
Published:
Hybrid energy amplification via pneumatic augmentation for legged robots.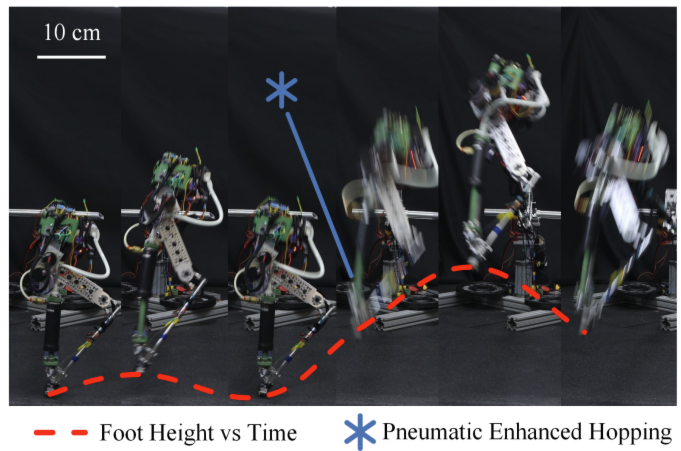
VR Force-feedback Gloves
Published:
Electrostatic adhesive brake for variable force tactile feedback.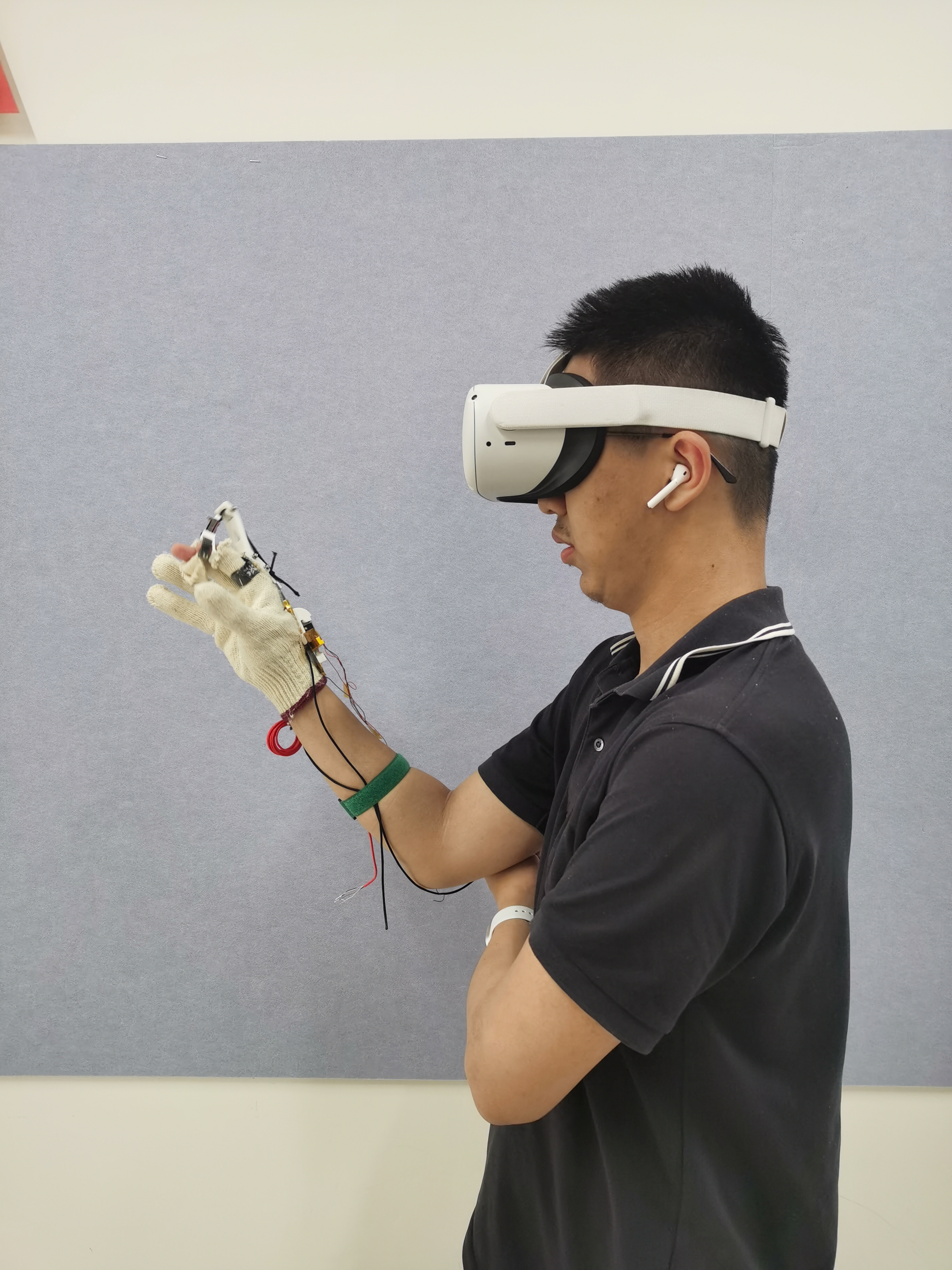
Origami Pipe-finder Robot
Published:
Anisotropic stiffness structure enables adaptive navigation in pipelines.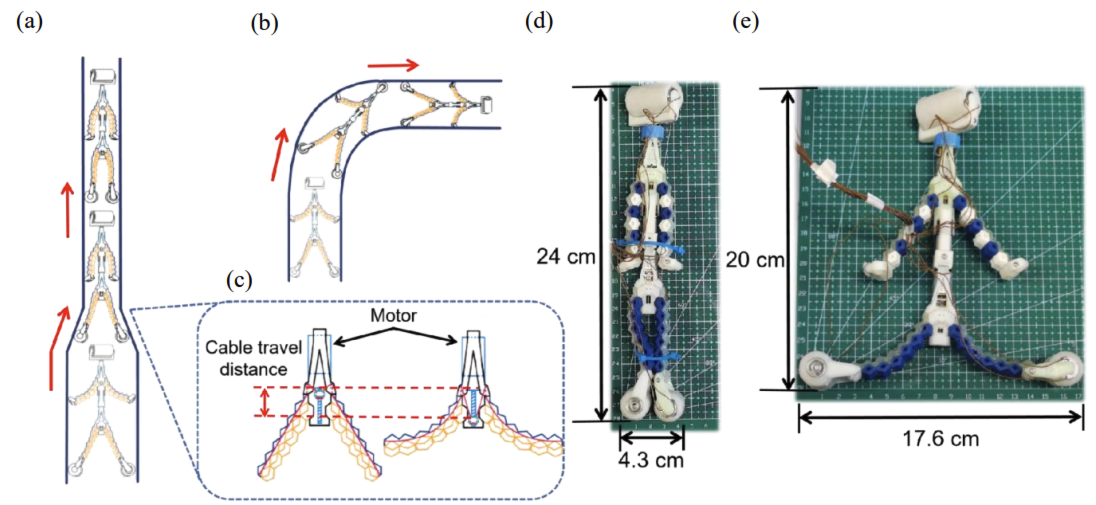
In-Hand Manipulation with Enforced Grasp Stability
Published:
Embedding force closure and torque sensing into RL for contact-rich manipulation.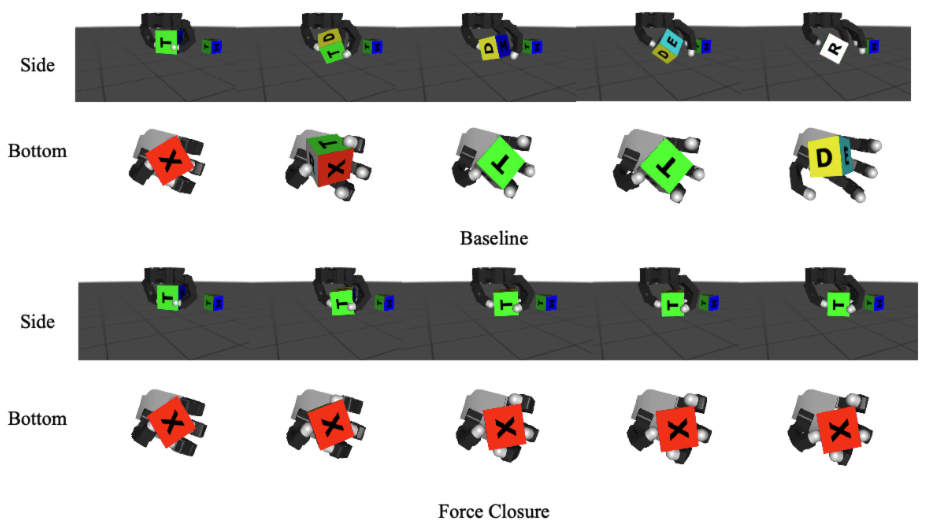
Simulation Deployment for Bi-Manual Dexterous Teleoperation System
Published:
Built simulation environments in Drake, MuJoCo, and Genesis to enable teleoperation and policy training for a high-DOF humanoid manipulation platform.
Unitree G1 Humanoid Motion Control Deployment
Published:
Developed and deployed high-/low-level motion control framework for Unitree G1 humanoid robot, enabling dual-arm Dex3 manipulation, whole-body motion policies, and real-time multi-policy ONNX deployment. 
RDS 2025: Robotic Hand Control System
Published:
Designed tendon-based kinematics and control software for a multi-DOF robotic hand with SEA-based compliant actuation and real-time CAN communication.
publications
Pipe-finder: Adaptive, Lightweight Pipe Robot Integrating Origami Anisotropic Stiffness Structure
Published in 2023 IEEE International Conference on Robotics and Biomimetics (ROBIO), Koh Samui, Thailand, 2023
Developed an adaptive pipeline robot with Origami Anisotropic Stiffness Structure for enhanced flexibility and efficiency in navigation.
Recommended citation: Y. Chen, D. Yang, Z. Liu, B. Yang, and H. Wang. (2023). "Pipe-finder: Adaptive, Lightweight Pipe Robot Integrating Origami Anisotropic Stiffness Structure." 2023 IEEE International Conference on Robotics and Biomimetics (ROBIO), Koh Samui, Thailand. doi: 10.1109/ROBIO58561.2023.10354759.
Download Paper | Download Slides
Explosive Legged Robotic Hopping: Energy Accumulation and Power Amplification via Pneumatic Augmentation
Published in 2024 IEEE International Conference on Intelligent Robots and Systems (IROS), Abu Dhabi, 2024
Designed a hybrid energy mechanism that stores kinetic energy as pneumatic energy to enhance jumping performance.
Recommended citation: Y. Chen, A. Gamboa-Gonzalez, M. Wehner, and X. Xiong. (2024). "Explosive Legged Robotic Hopping: Energy Accumulation and Power Amplification via Pneumatic Augmentation." 2024 IEEE International Conference on Intelligent Robots and Systems (IROS), Abu Dhabi. arXiv:2312.05773 [cs.RO].
Download Paper | Download Slides
In-Hand Manipulation with Enforced Grasp Stability for Contact-Rich Tasks
Published in IEEE ICRA 2025 Workshop on Contact-Rich Manipulation (CRM), Atlanta, GA, 2025
Proposed reinforcement learning methods that integrate force-torque sensing and force-closure rewards to enhance in-hand grasp stability during dexterous manipulation.
Recommended citation: Y. Chen*, S. Lu*, H. Zhang, and K. Lynch. (2025). "In-Hand Manipulation with Enforced Grasp Stability for Contact-Rich Tasks." IEEE ICRA 2025 Workshop on Contact-Rich Manipulation (CRM), Atlanta, GA. [Online]. Available: https://openreview.net/forum?id=YK2YeuL2rU
Download Paper
talks
Talk 1 on Relevant Topic in Your Field
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Conference Proceeding talk 3 on Relevant Topic in Your Field
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
teaching
Teaching experience 1
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Teaching experience 2
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.