
Simulation Deployment for Bi-Manual Dexterous Teleoperation System
Published:
This project supports the development of autonomous dexterous manipulation policies by enabling full-stack simulation of the DexNex platform — a bi-manual robot with Shadow Dexterous Hands — across multiple simulators including Drake, MuJoCo, and Genesis.
📍 Affiliation: HAND Engineering Research Center, Northwestern University
🔧 Role: Simulation Engineer (System Integration)
🔬 Keywords: teleoperation, dexterous hands, simulation, Drake, MuJoCo, Genesis, policy training
Highlights
- 🛠️ System: DexNex includes dual ABB GoFa arms, Shadow Hands with 35 controllable joints, and full tactile and visual sensing.
- 🎮 Goal: Reconstruct the entire system in simulation to support teleoperation, demonstration collection, and diffusion policy learning.
- 🌐 Multi-Sim Deployment:
- Built high-fidelity kinematic and dynamic models in Drake, matching physical behavior for remote control.
- Ported the system to MuJoCo for high-speed RL experimentation and contact-rich manipulation.
- Extended compatibility to Genesis for visual realism and future sim2real validation.
Key Results
- 🧪 Enabled real-time teleoperation in Drake, improving feedback alignment and training data quality.
- 🔁 Cross-simulator consistency allows for policy benchmarking under different dynamics and rendering conditions.
- 🚀 Accelerated experimentation by reducing setup effort for downstream ML training and hardware integration.
Robot Model: https://github.com/yifeichen2024/avater_drake
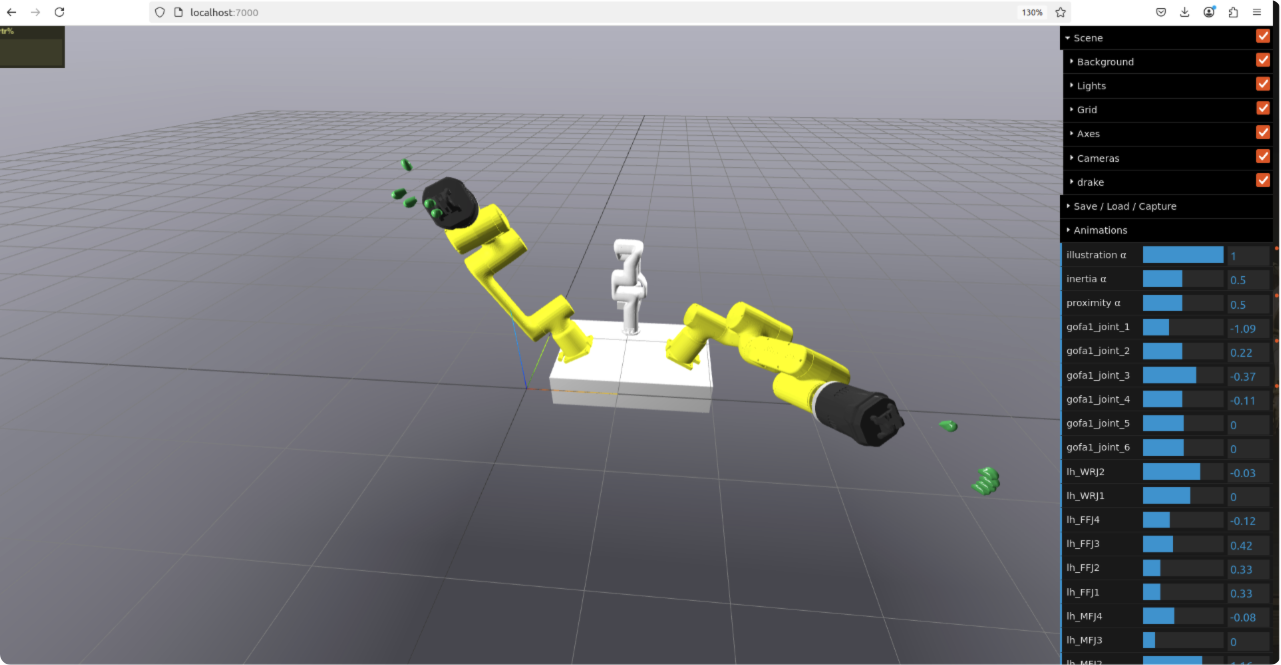 Figure: Simulated DexNex system with dual arms and dexterous hands in a manipulation task.
Figure: Simulated DexNex system with dual arms and dexterous hands in a manipulation task.
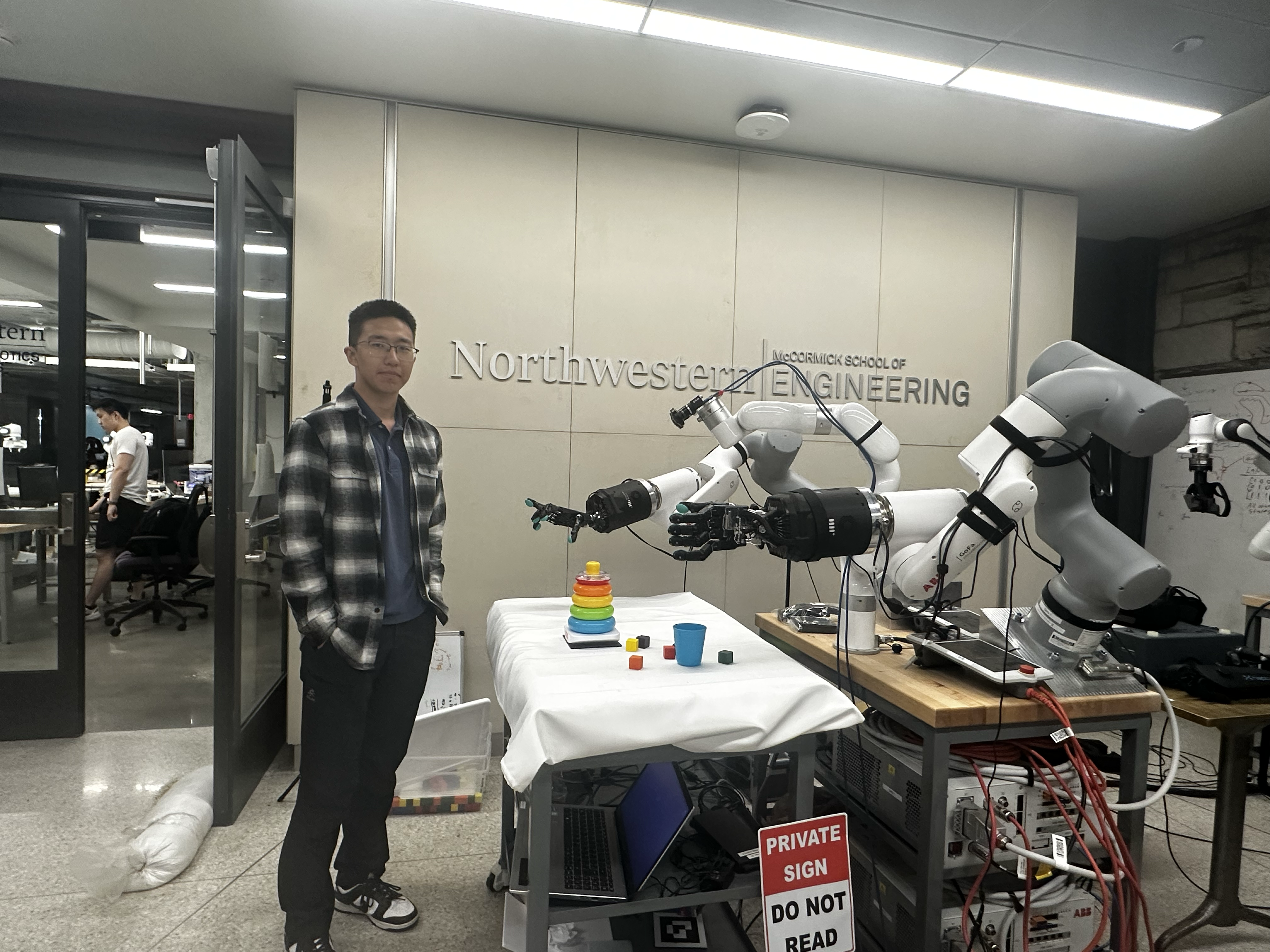 Figure: Me with DexNex system with dual arms and dexterous hands.
Figure: Me with DexNex system with dual arms and dexterous hands.