
In-Hand Manipulation with Enforced Grasp Stability
Published:
This work proposes a novel reinforcement learning pipeline that embeds force/torque sensing and force-closure-based rewards into in-hand manipulation training, significantly improving grasp stability and policy convergence.
📍 Presented at: ICRA 2025 Workshop — Learning Meets Model-Based Methods for Contact-Rich Manipulation
✍️ Authors: Yifei Chen*, Shihan Lu*, Haoxuan Zhang, Kevin M. Lynch
🔬 Keywords: dexterous manipulation, force closure, RL, grasp stability, contact-rich tasks
Highlights
- 💡 Problem: Existing in-hand policies often lack true grasp stability, relying on palm support or precarious fingertip balancing.
- 🧠 Solution: Introduce force/torque readings at fingertips into the observation space and design a reward encouraging multi-finger contact and force closure.
- 🔬 Method:
- SAC agent learns to rotate a cube in-hand using a palm-down Allegro Hand in MuJoCo.
- Grasp stability is quantified using SVD over the grasp wrench matrix.
- RL reward combines rotation progress, object drop penalty, and contact quality.
Key Results
- 🚀 With FC reward and F/T sensing, episode duration and stability improve significantly.
- 🧪 Robustness maintained even under randomized initial cube states.
- 🎯 Clear trade-off learned between in-hand rotation and grasp security.
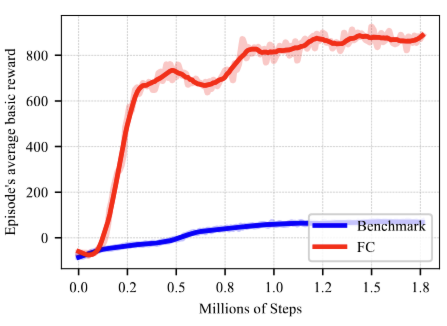 Figure: Comparison of average reward during training with and without force-closure reward.
Figure: Comparison of average reward during training with and without force-closure reward.
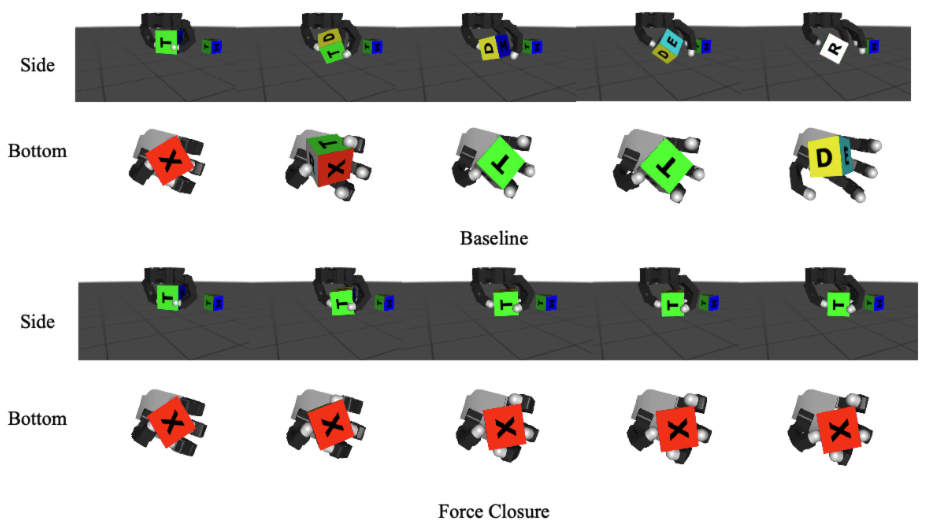 Figure: Manipulation time-lapse. FC policy maintains better contact during spinning.
Figure: Manipulation time-lapse. FC policy maintains better contact during spinning.