Explosive Legged Robotic Hopping Robot
Published:
Hybrid energy amplification via pneumatic augmentation for legged robots.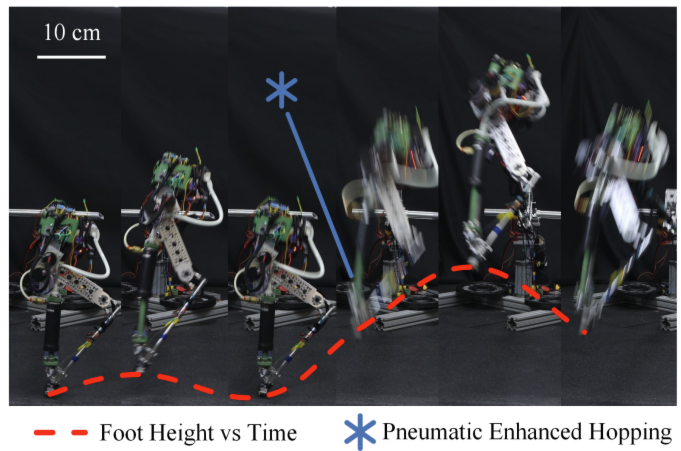

Published:
Hybrid energy amplification via pneumatic augmentation for legged robots.
Published:
Electrostatic adhesive brake for variable force tactile feedback.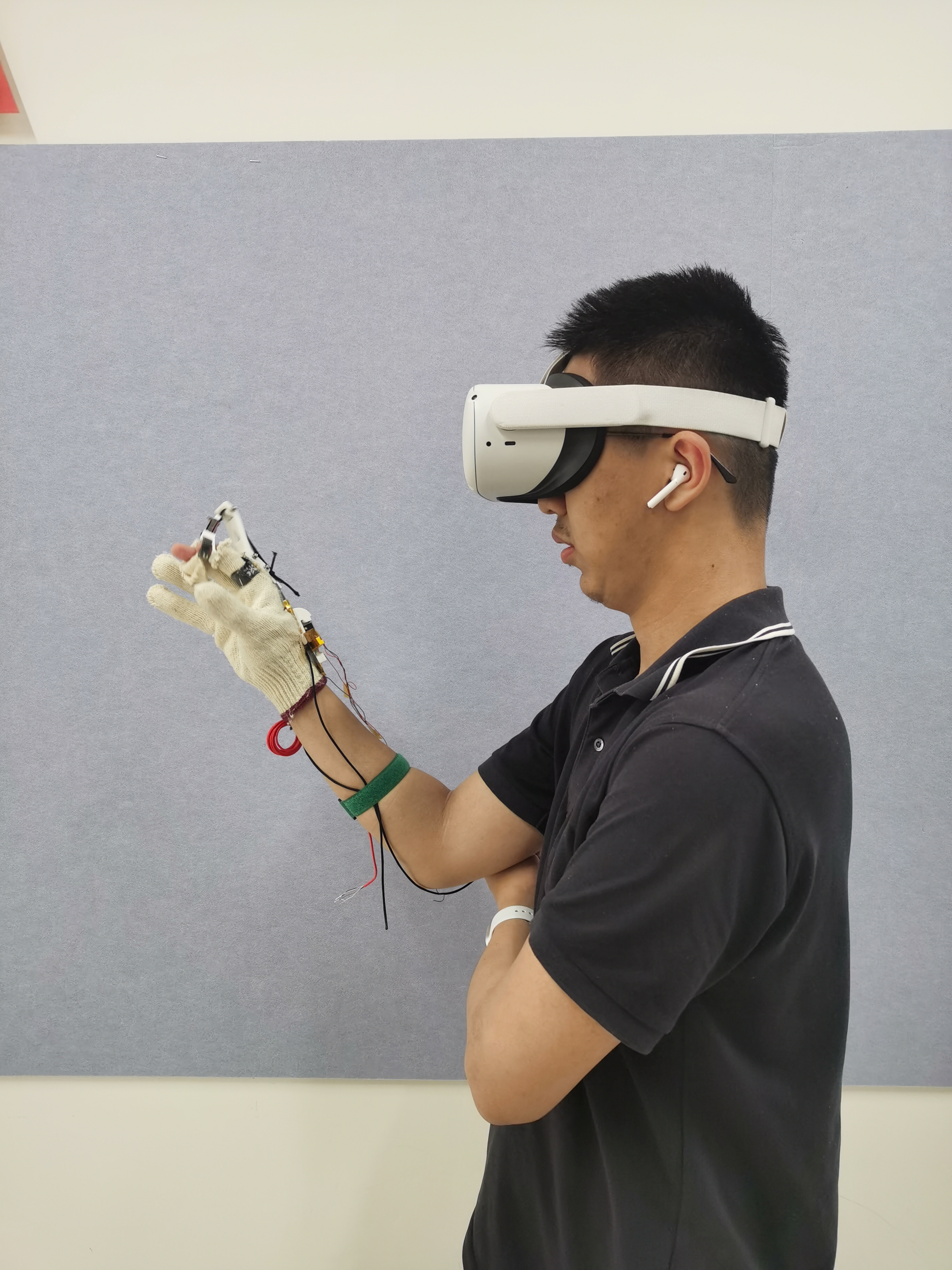
Published:
Anisotropic stiffness structure enables adaptive navigation in pipelines.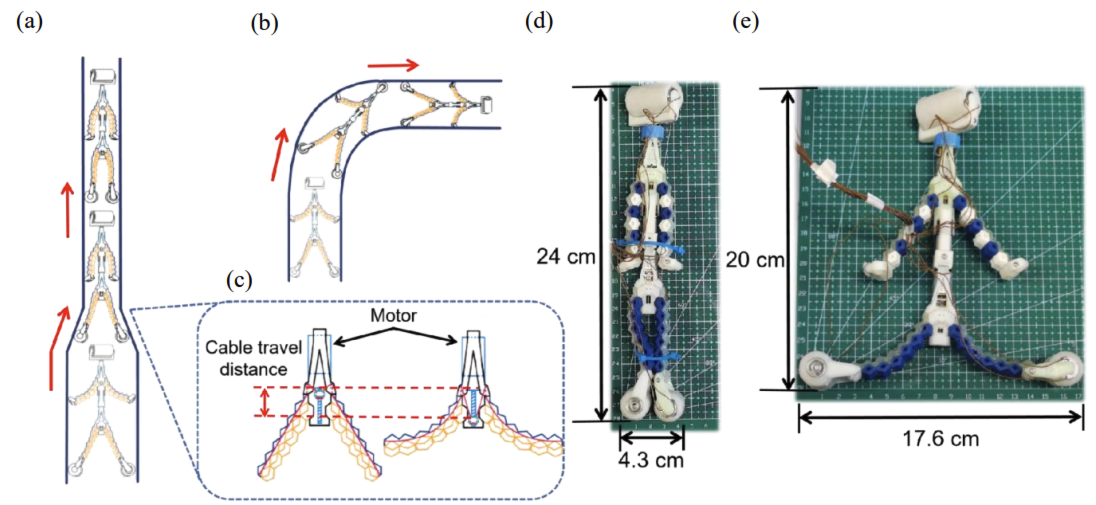
Published:
Embedding force closure and torque sensing into RL for contact-rich manipulation.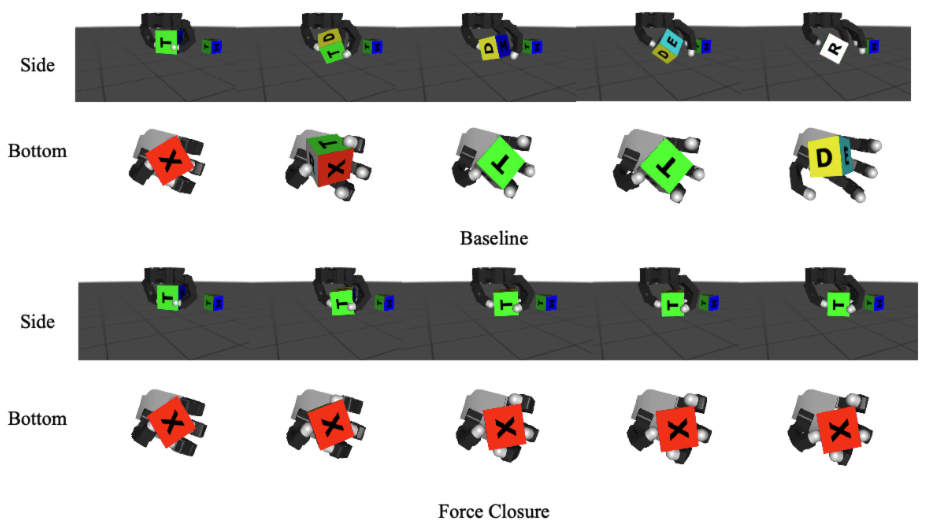
Published:
Built simulation environments in Drake, MuJoCo, and Genesis to enable teleoperation and policy training for a high-DOF humanoid manipulation platform.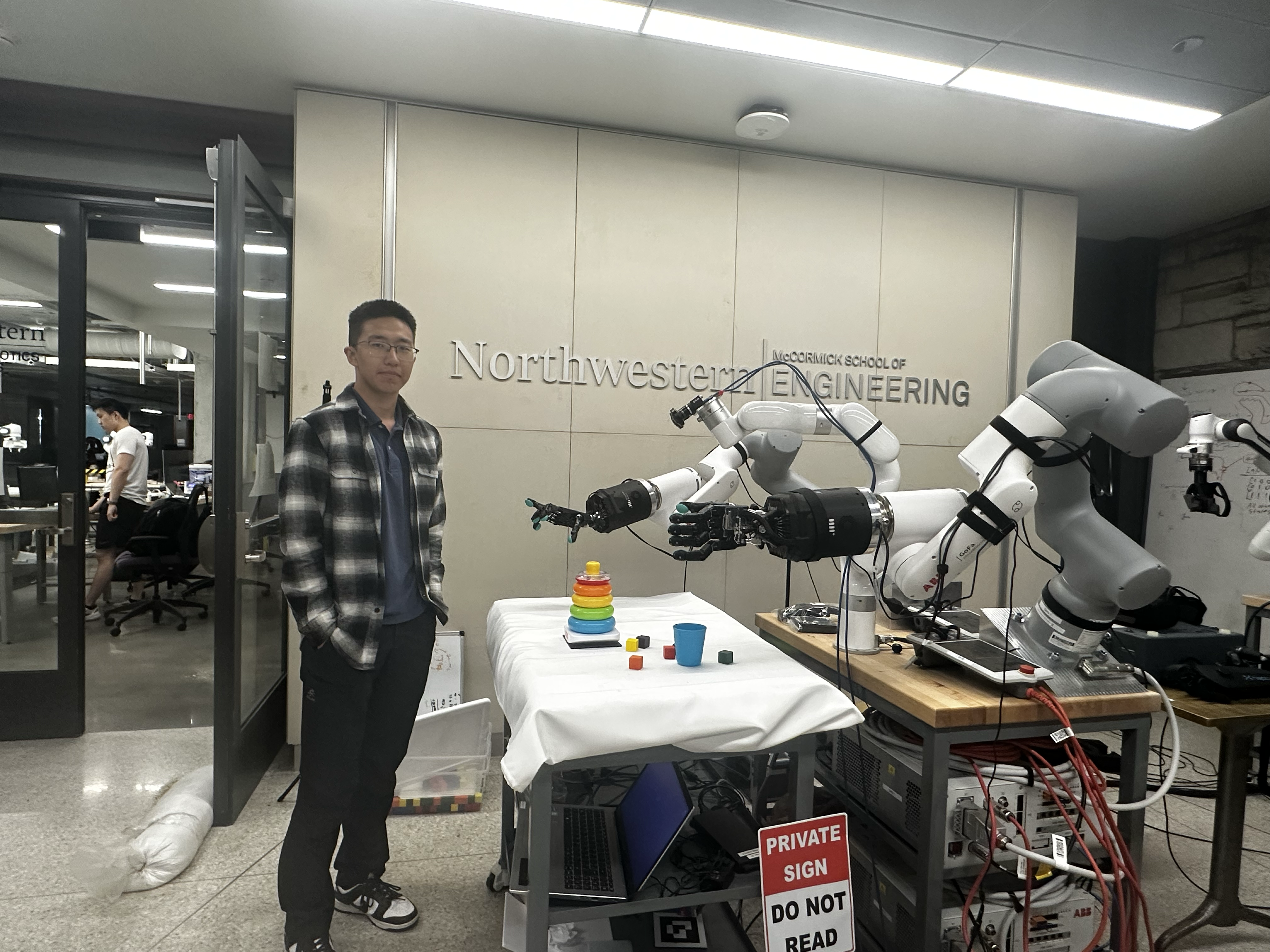
Published:
Developed and deployed high-/low-level motion control framework for Unitree G1 humanoid robot, enabling dual-arm Dex3 manipulation, whole-body motion policies, and real-time multi-policy ONNX deployment. 
Published:
Designed tendon-based kinematics and control software for a multi-DOF robotic hand with SEA-based compliant actuation and real-time CAN communication.